Hrishikesh ViswanathI am a PhD student at Purdue University, advised by Aniket Bera. My overarching goal is to bridge physical modeling and scalable surrogate models, with a focus in robotics and reinforcement learning (RL). I am broadly interested in scalable models for physics and their potential applications in robotics. A core problem driving my research is how to effectively integrate Partial Differential Equation (PDE) formulations and generative priors to provide geometric structure and stabilize continuous control and RL policies. At a foundational level, I want to address the challenge of learning high-fidelity dynamics in sparse data regimes. My work relies on two core pillars: efficient modeling techniques like model-order reduction, and scalable learning strategies such as lightweight physics-informed learning, leveraging alternatives to autodiff residuals such as Monte-Carlo methods (Walk-on-Spheres). Outside the lab, I was the 2024 Vice President of Purdue SEARCH. I mentored our NASA SUITS team to the competition finals, earning a NASA Artemis I mission flag that flew around the moon. |
|
Posts
Machine Learning Essentials (Jul 2024)A comprehensive list of resources to build an undergraduate-level foundation in ML, Linear Algebra, AI, and Statistics.
Reading List (Oct 2022)A curated collection of papers, books, and resources related to my core research interests. |
ResearchI'm interested in robotics, reinforcement learning, operator learning and PINN. |
|
Neural Operator: Is data all you need to model the world? An insight into the paradigm of data-driven scientific MLHrishikesh Viswanath, Md Ashiqur Rahman, Abhijeet Vyas, Andrey Shor, Beatriz Medeiros, Stephanie Hernandez, Suhas Eswarappa Prameela, Aniket Bera IEEE Transactions on Pattern Analysis and Machine Inteligence, 2026 arxiv / A survey of advances and challenges in data-driven Scientific ML |
|
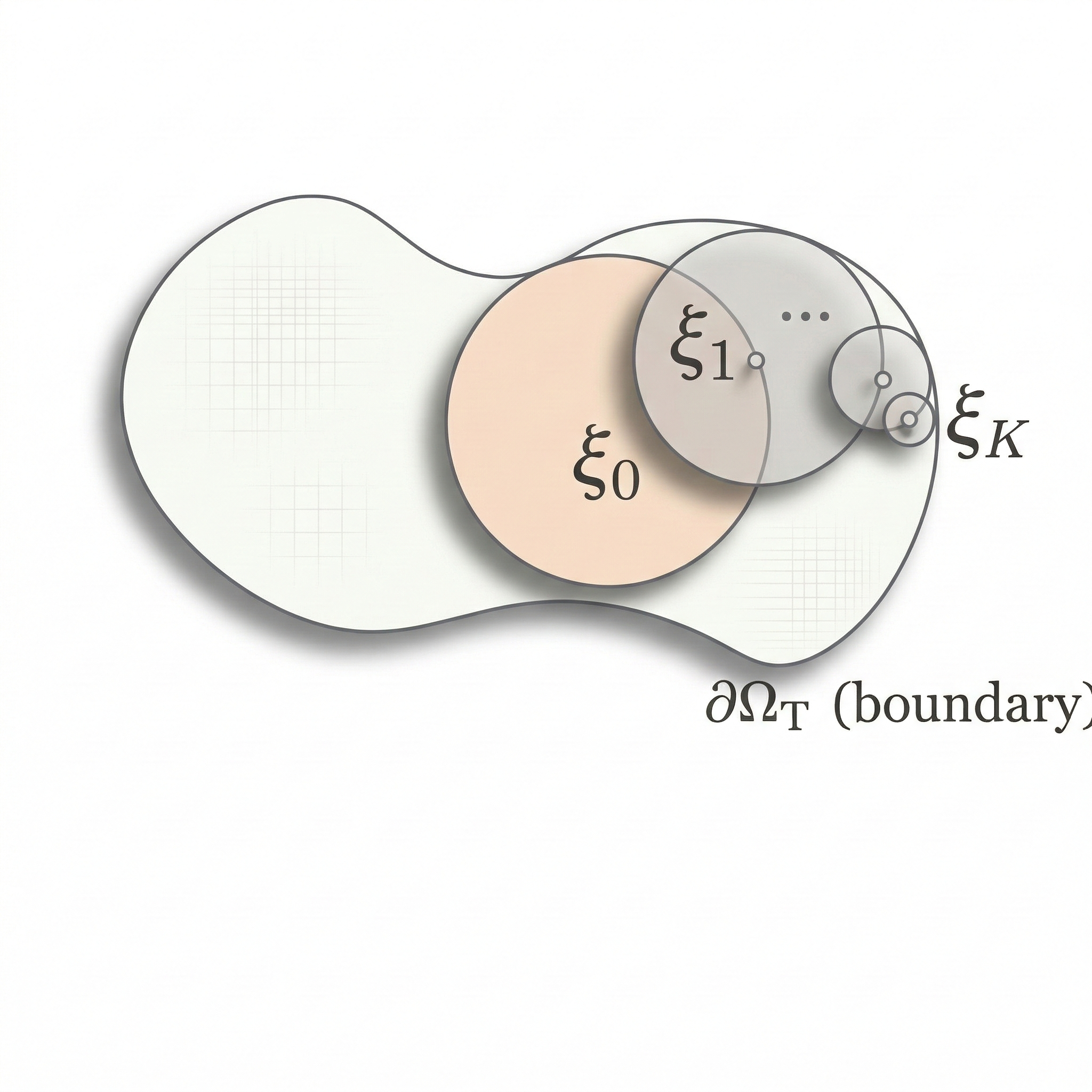
Operator Learning Using Weak Supervision from Walk-on-SpheresHrishikesh Viswanath*, Hong Chul Nam*, Julius Berner, Anima Anandkumar, Aniket Bera Arxiv, 2026 arxiv / code / A mesh-free training scheme that amortizes the cost of Monte Carlo walks by using the Walk-on-Spheres algorithm to provide cheap, unbiased stochastic supervision for neural operators. |

|
Learning Lagrangian Interaction Dynamics with Sampling-Based Model Order ReductionHrishikesh Viswanath, Yue Chang, Aleksey Panas, Julius Berner, Peter Yichen Chen, Aniket Bera Transactions on Machine Learning Research, 2026 arxiv / code / website / A sampling-based framework that evolves Lagrangian systems directly in physical space using data-driven neural PDE operators and learnable kernel ROM parameterization |
|
Physics Informed Viscous Value RepresentationsHrishikesh Viswanath, Juanwu Lu, S. Talha Bukhari, Damon Conover, Ziran Wang, Aniket Bera Arxiv, 2026 arxiv / code / We introduce a physics-informed regularization for offline GCRL derived from the Hamilton-Jacobi-Bellman (HJB) equation’s viscosity solution. By applying the Feynman-Kac theorem, we recast value estimation as a stable Monte Carlo expectation, ensuring geometric consistency and superior performance in high-dimensional navigation and manipulation tasks. |
|
Gradient-Free Physics-informed Operator Learning using Walk-on-SpheresHrishikesh Viswanath*, Hong Chul Nam*, Julius Berner, Anima Anandkumar, Aniket Bera NeurIPS 2025 AI for Science Workshop, 2025 arxiv / A PINO technique for training operators using Monte-Carlo Walk-on-Spheres |
|
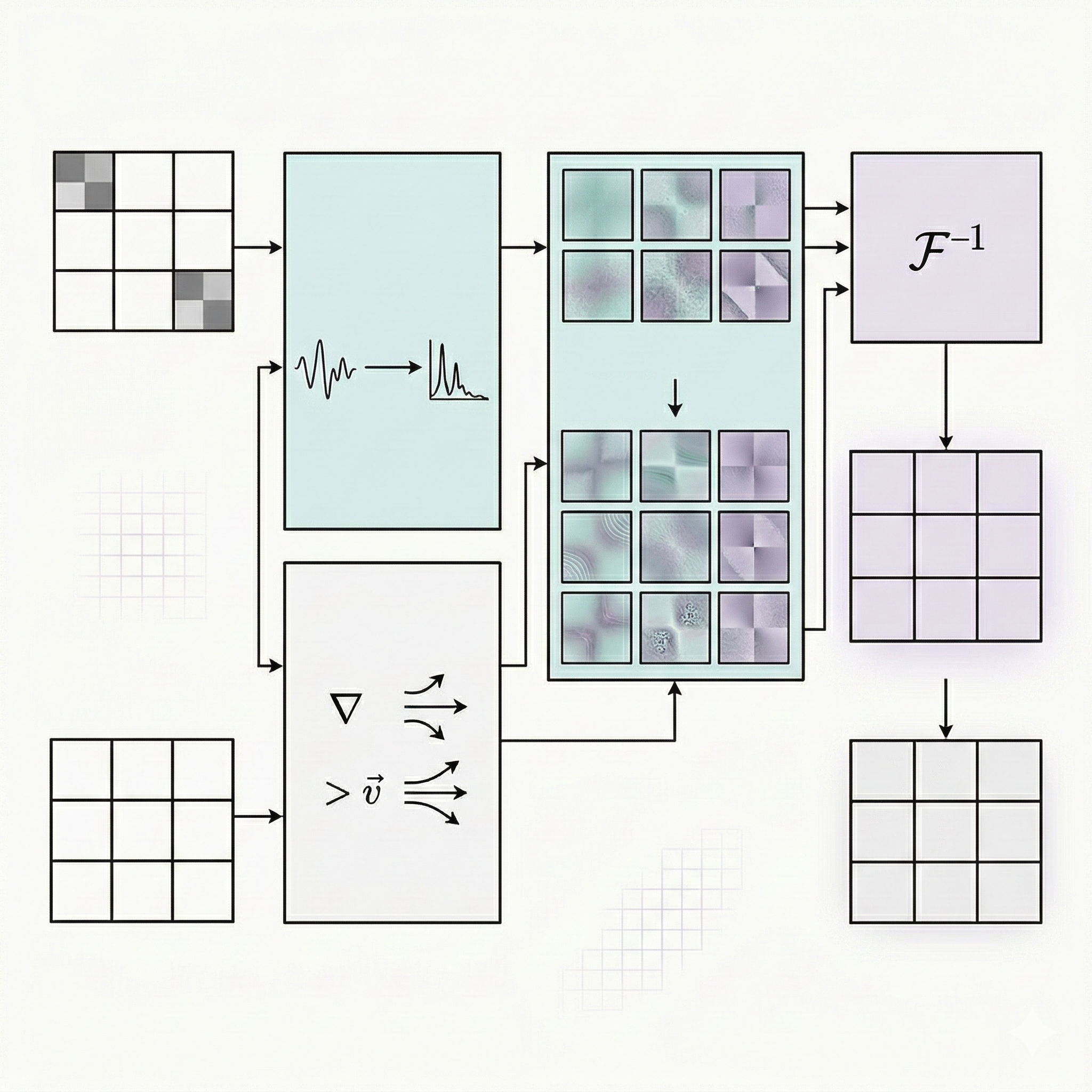
Physics-informed adaptive fourier neural interpolation operator for synthetic frame generationHrishikesh Viswanath*, Md Ashiqur Rahman, Rashmi Bhaskara, Aniket Bera US Patent App. 18/758,927, 2025 We introduce a resolution-independent neural operator architecture for synthetic frame generation that leverages global convolutions in the Fourier spectral domain via Fast Fourier Transform (FFT). |
|
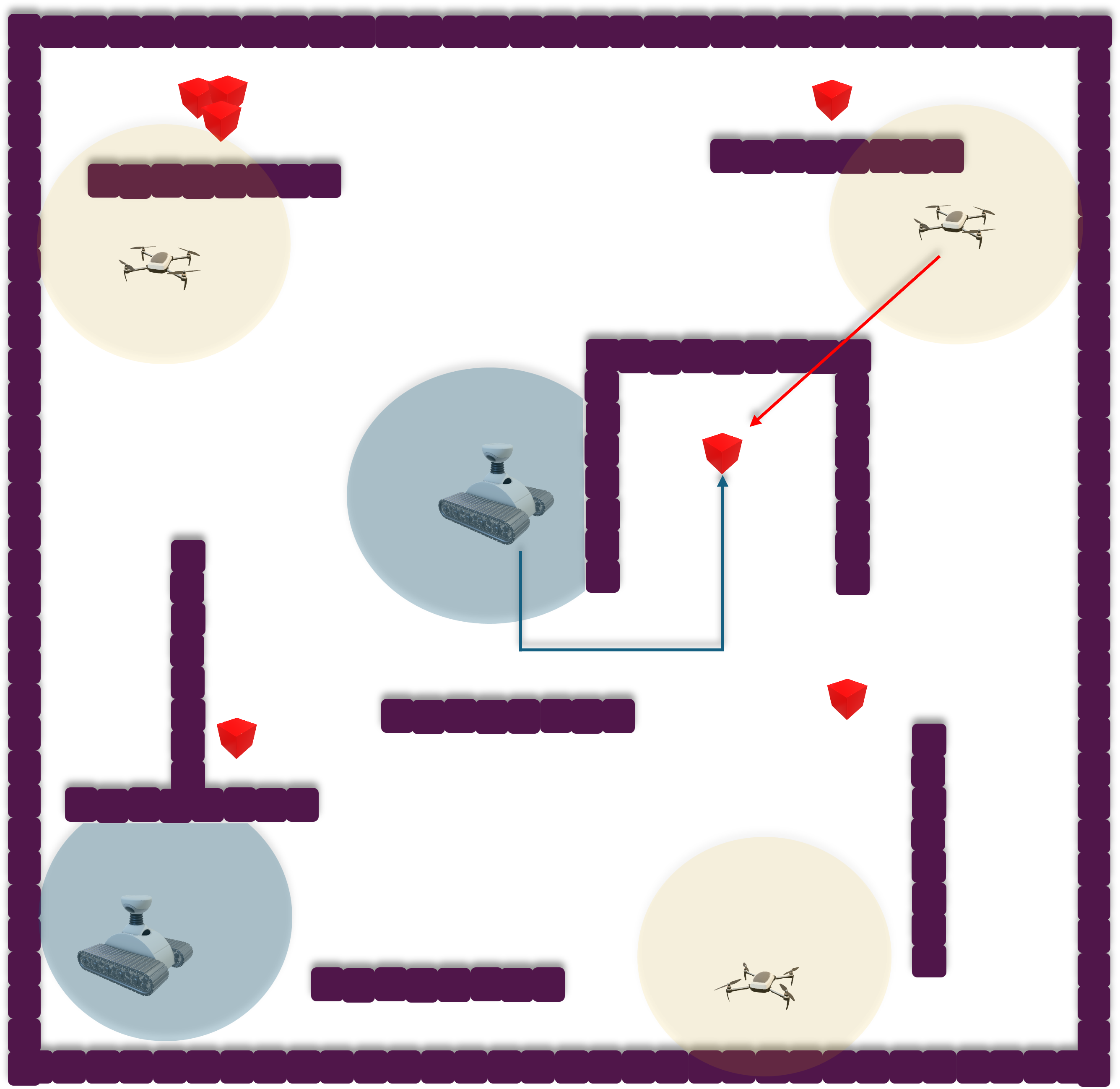
Graph-based decentralized task allocation for multi-robot target localizationJuntong Peng, Hrishikesh Viswanath, Aniket Bera IEEE Robotics and Automation Letters, 2024 arxiv / code / A decentralized graph neural operator approach for robust and scalable task allocation in heterogeneous UGV-UAV teams. |

|
Trajectory prediction for robot navigation using flow-guided markov neural operatorRashmi Bhaskara*, Hrishikesh Viswanath*, Aniket Bera 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024 arxiv / An Optical Flow-Integrated Markov Neural Operator that models pedestrian trajectory prediction as a Markovian process, eliminating the need for historical state storage. |

|
FairPy: A Toolkit for Evaluation of Prediction Biases and their Mitigation in Large Language ModelsHrishikesh Viswanath, Tianyi Zhang Arxiv, 2023 arxiv / code / We present a comprehensive survey and a modular toolkit of mathematical frameworks for quantifying and mitigating prediction bias in Large Language Models (LLMs). |
Selected Coursework
|
Reviewing
2026: ICLR, ICML, RA-L |
||||||||||
Mentorship & Leadership
|
||||||||||
Open Source Contributions |
|
Design and source code from Jon Barron's website |